The first of 2 planned Robotic Feral Public Authors has been completed and is ready for its first field trial in London Fields next week:

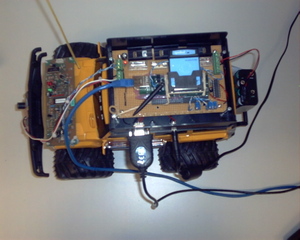
The robot has two sensors (air quality and carbon dioxide) and GPS location sensing. The sensors were selected to reflect the concerns voiced in our community pollution mapping workshop back in November, which identified air pollution as the key environmental issue of local residents. The robot communicates its Lat/Long position and sensor readings back to the Urban Tapestries public authoring system via a WiFi connection. For the field trial in London Fields we will be meshing two battery-powered Locustworld meshboxes with SPACE's own public WiFi network.
The robot has been built by Dima Diall at Birkbeck College/London Knowledge Lab, with assistance from Dimitri Airantzis and Dr George Roussos. The integration with Urban Tapestries and data visualisation of the sensor traces has been achieved by George Papamarkos. Results from the field trial will be posted shortly.